- Vol.2 - SRDでリギングが変わる ”フットストレッチャー角度と母指球下がり”
バーチャルピボット機能によってストローク中に靴底の踏み面の傾きが変化し、母指球下がりを小さく(母指球位置を高く)できるSRD(Shimano Rowing Dynamics)は、ドライブ中盤オールの引き力が効率よくボート推進力に変換できるオール振り角の範囲で、既存システムより大きなオール角速度を達成し、効率の良いロウイングを可能にする。
※母指球下がり:中足趾節関節とシート面の高低差(図1参照)

- 最初に、FSポジション,ゲート高さ,母指球下がりは、既存システムと同じディメンジョンでストローク中、靴底の踏み面の傾きが変化する範囲を変えながら実漕を行った。 そして、SRDで踏み面の最小傾き角を37(度)付近(図2参照)に設定すれば、ストロークレート(以下SR)を高くしても既存システムより窮屈感のないフォワードができることが確められた。
- 次に、オールの操作性とオールの振り角に大きく影響するFSポジションとゲート高さのディメンジョンを既存システムと同じに保ち、ストローク中靴底の踏み面が傾く範囲と、母子球下がりを調節しながら、窮屈感のないフォワードができ、かつキャッチ時のオール振り角が既存システムと同程度でありながら、ドライブ中盤でも手応えのあるFSへの踏み込みができる条件を見出した。
- 本被験者の場合、ストローク中靴底の踏み面が傾く範囲が50(度)から37(度)で、母指球下がりを既存システムより1.5(cm)小さくした条件が、求められる最適な条件になった。

ドライブの中盤(図3参照)では、大腿と水平線がなす角度(以下大腿角)が小さくなるほど、大腿伸展に働く大殿筋に代表される臀部の筋群は、 筋長が短くなり力を出しにくくなる。
SRDの場合上述したように母指球下がりを小さくできる。
そのため、図3に示すようにドライブの中盤シートが既存システムと同じ位置で大腿角が大きくなり、既存システムより大きな大腿伸展力の出力が可能になる。 このことがSRDの手応えのあるFSへの踏み込みの要因になっている。
そこで、SRDが及ぼす影響を知るために、シングルスカルでレース状態に近いSR30で漕ぎ、SRDと既存システム間のロウイングの違いを確かめた。

そこで、上記3.の条件でリギングしたSRDと既存システムをシングルスカルに装着し、レース状況に近いSR30で漕いだ場合の両者間の差異を確かめた。
ここでは、その結果をオールの振り角の変化パターンから説明する。
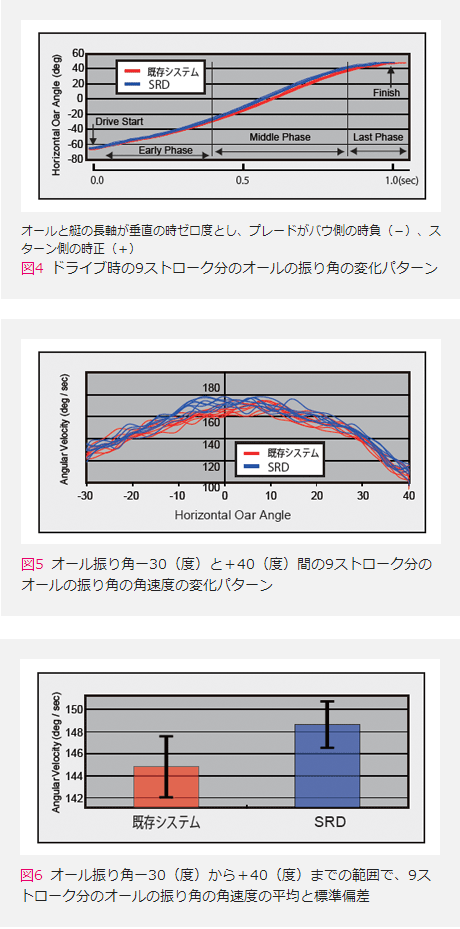
図4は、SDRと既存システムについて、ドライブ開始からフィニッシュまでの9ストローク分のオール振り角の変化を表している。
オールと艇の長軸が垂直の時をゼロと定義すると、ドライブ開始からオールの振り角-30(度)付近(以下序盤)までと、+40(度)以後フィニッシュの範囲(以下終盤)はSRDと既存システムの曲線はほぼ重なっている。
これらの事は、本実験の被験者の場合SRDで既存システムより母指球下がりを1.5(cm)小さくし、靴底の踏み面が傾く範囲を50(度)から37(度)に設定したことが、序盤と終盤のオール振り角にほとんど影響しなかったことを表している。
一方、-30(度)から+40(度)の範囲(以下中盤)ではSRDと既存システム間でオール振り角の変化パターンが異なり、SRDが既存システムよりグラフの立ち上がりが早くなっている。
このことは、ドライブの中盤では、SRDの方がオールの振り角の角速度が大ききくなる事を示している。
図5は、SRDと既存システムについて、オール振り角-30(度)から+40(度)の範囲の9ストローク分のオールの振り角の角速度を示している。
図5からは、特にオール振り角-10(度)から+10(度)あたりの範囲で、SRDの方が全体的に角速度が大きいことがわかるが、この図で示したオール振り角-30(度)から+40(度)の範囲全体でSRDと既存システム間の違いをみるために、図6で9ストローク分のオールの振り角の角速度の平均と標準偏差を比較した。
その結果、SRD148.7±2.1(度/秒)、既存システム145.0±2.7(度/秒)でSRDの方が有意に大きかった(P<0.05)。
このことは、SRDがドライブの中盤、つまりオールの引き力が効率よくボート推進力に置き換わるオール振り角の範囲において、既存システムよりオール振り角の角速度が大きくなることを示している。
これは、SRDを使用することで、特に母指球下がりを既存システムより小さくできたことにより、ドライブ中盤既存システムより大きな大腿伸展力を得て、より強い力でオールを引くことが可能になったことを表している。